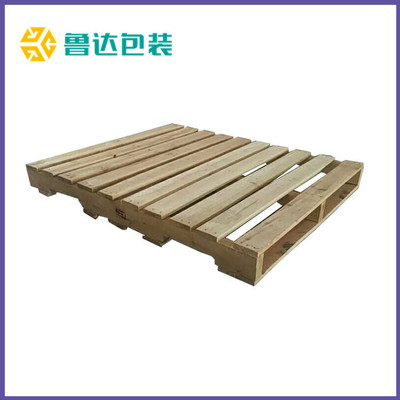
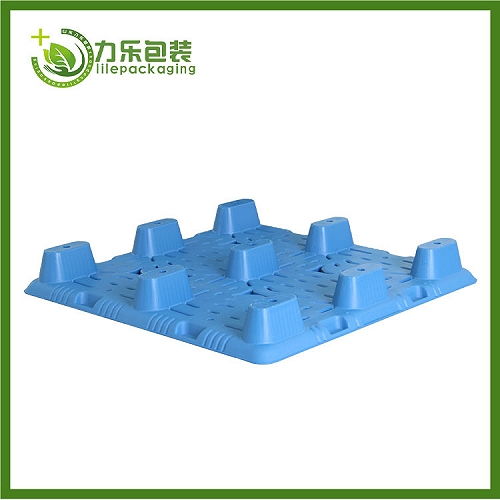
百分百木包裝廠專注于木質包裝箱的設計與生產,致力于為客戶提供安全、可靠且環保的包裝解決方案。我們采用優質木材,結合先進工藝,確保每一件包裝箱在運輸和存儲過程中都能有效保護產品。我們的產品廣泛應用于機械設備、電子產品、家具等領域,并可根據客戶需求定制尺寸和結構。憑借多年的行業經驗,我們嚴格把控質量,力求做到百分百滿意。選擇百分百木包裝廠,就是選擇專業與信賴。
百分百木包裝廠 優質包裝箱制造之道

如若轉載,請注明出處:http://www.quorvuscollection.cn/product/24.html
更新時間:2026-06-18 15:34:20